






SimpleBGC 32bit Extended



Up to 6s LiPo battery is supported
Built-in sound beeper
Additional I2C port to connect 2nd IMU or encoders
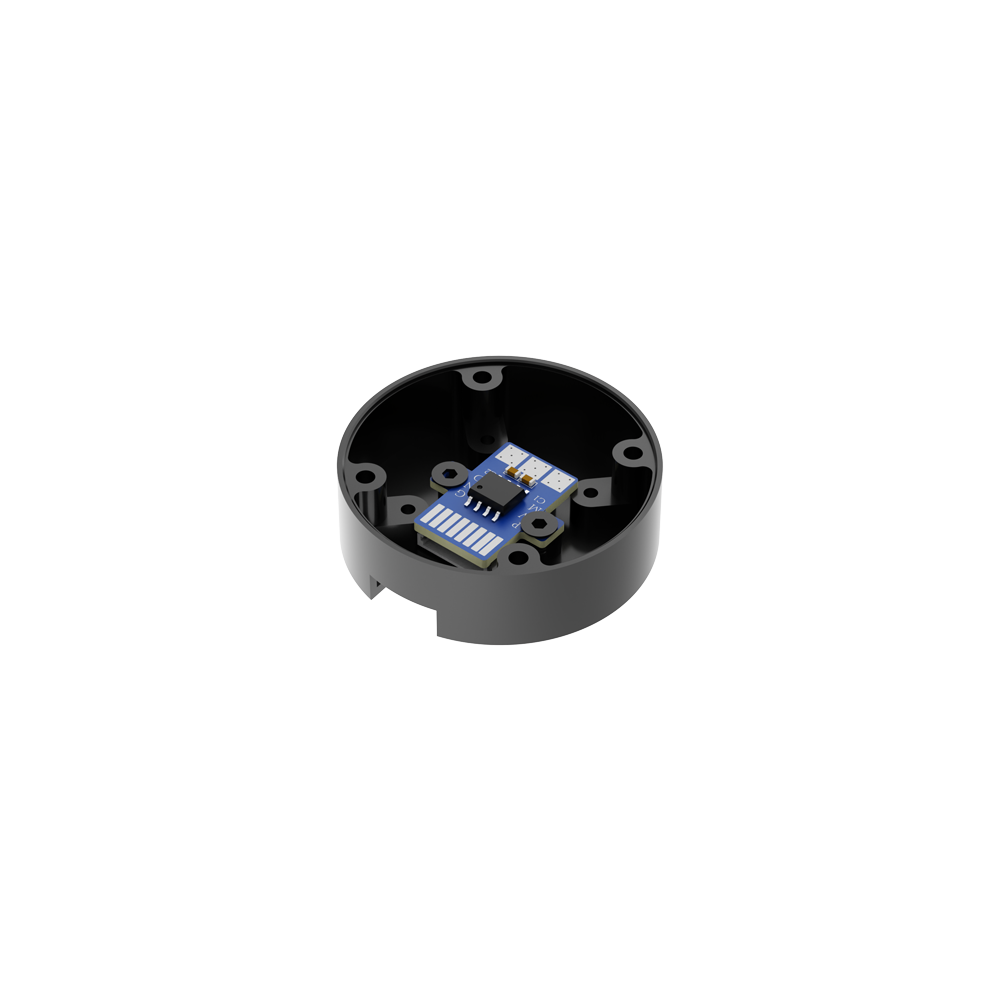
Dedicated 3x SPI/PWM ports for encoder connection
CAN-bus to replace I2C for the IMU sensor and other periphery connection
Current sensor to measure battery power consumption
3V output current: 150 mA
5V output current to power external devices: up to 1 A
Maximum motor current: 1,5 A
Power supply voltage: 8-26 V (3s-6s LiPo)
Diameter of the mounting holes: 3 mm
Distance between the mounting holes: 45 mm
Size of the board: 50×50 mm
Prevents motors from losing synchronization and skipping steps.
Provides the information about frame angle and angle of the camera relative to frame, that can be important for some kind of applications.
For many cases it can significantly decrease power consumption by using field-oriented control strategy to drive motors.
Increases instant torque in the same way.
Allows the controller to get information about the camera balance for automatic balancing (with help of extra DC servo motors and moving counterweights).
The firmware also retains an option to adjust camera position by hands.
Increases the precision of stabilization by applying FOC-specific compensations.
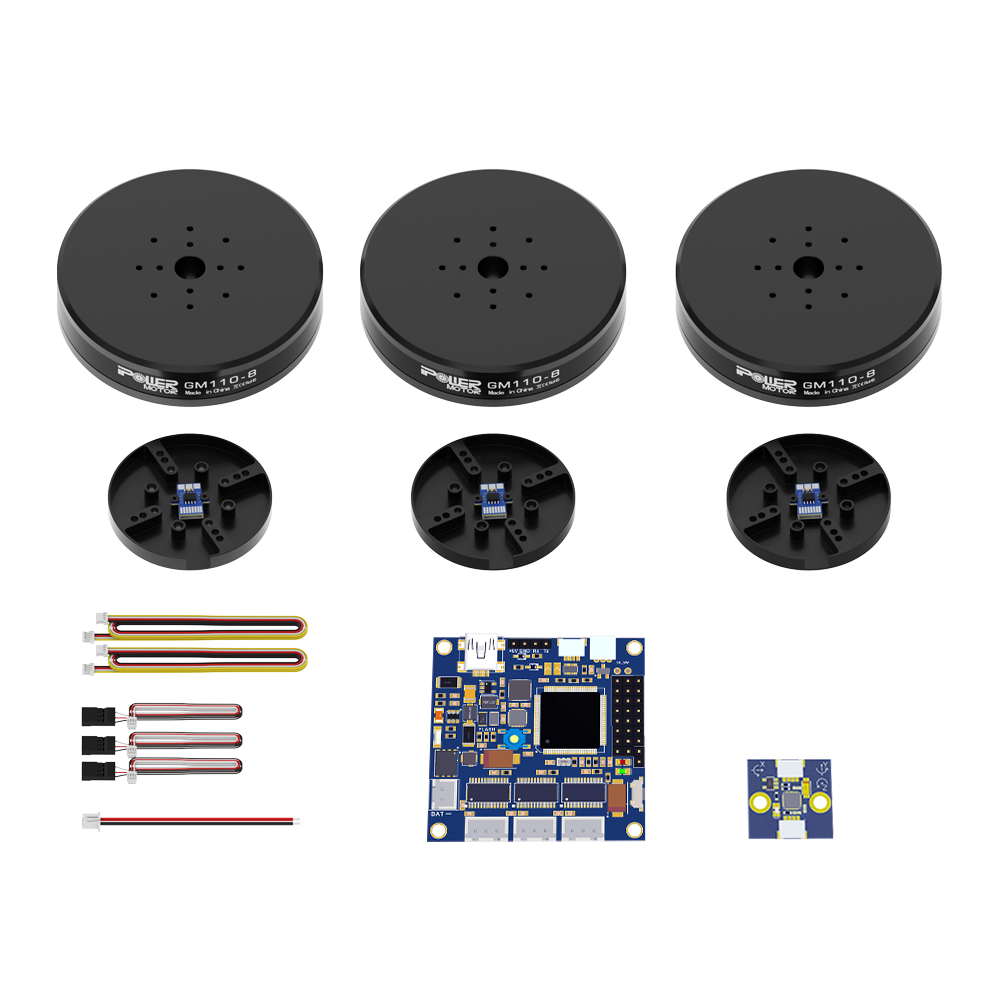
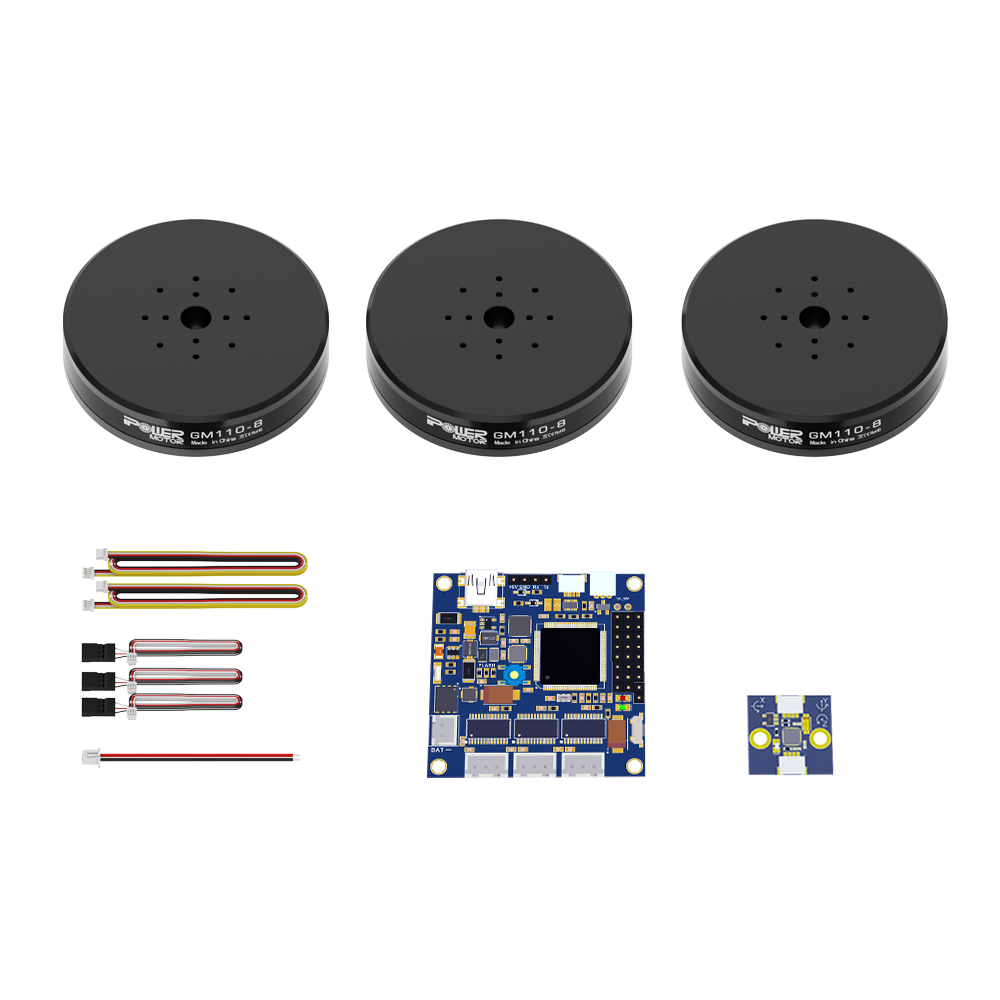
1 x BaseCam SimpleBGC 32-bit Extended - Encoder Firmware enabled
1 x Camera IMU& NEccessory Wires
https://www.basecamelectronics.com/simplebgc32bit/#specs-tab
1. iFlight products may be used for civilian purposes only and any direct or indirect use of iFlight products for or in connection with the following is prohibited:
(1) Any military combat purpose or military combat related use;
(2) Terrorist activities: The purchaser also shall require its customers or end users to comply with the foregoing requirements.
2. iFlight Partners must strictly adhere to applicable export control and sanction laws as well as any written compliance requirements regarding these controls issued by iFlight from time to time.
If Party A has violated applicable export control or economic sanctions laws and regulations, Party B has the right to immediately suspend delivery of products to Party A or terminate relevant cooperation without any liability.
For more specific content, please check: https://shop.iflight.com/Export-Policy-info

